
File:ESA Rosetta NAVCAM Agilkia landing site on comet 67P 20141106 mosaic.jpg

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Original file (1,424 × 1,266 pixels, file size: 987 KB, MIME type: image/jpeg)
| This is a file from the Wikimedia Commons. Information from its description page there is shown below. Commons is a freely licensed media file repository. You can help. |
{kind=link}
Summary
| Description |
Afrikaans: Die Agilkia-landingsterrein is sigbaar op hierdie foto van die komeet 67P/Churyumov–Gerasimenko, wat op 6 November 2014 met die Rosetta-tuig se navigasiekamera geneem is, enkele dae voor die landingstuig Philae 'n historiese neerdaling na die oppervlak uitgevoer het. Die beeld is saamgestel uit 'n mosaiek van vier NavCam-beelde, wat op 'n afstand van 30,5 km bo die komeetmiddelpunt verkry is, terwyl Rosetta die separeringstrajek genader het, waarvandaan Philae op 12 November neergelaat is. Op hierdie afstand is die skaal 2,6 meter per beeldelement, en die volle mosaiek beslaan 3,7 x 3,3 km. Die beplande landingsplek het sowat 1 vierkante kilometer beslaan en is naby die bokant van die beeld, op die kleiner lob van die komeet geleë. Dit is naamlik gereken as die mins riskante terrein van al die landingsplekke wat tydens 'n seleksieproses oorweeg is. Die komeetoppervlak is oortrek met rotse waarvan sommiges groter as huise is, benewens steil hellings, diep holtes en hoë kranse. Op die beeld is die dun nekstreek opvallend wat die twee lobbe verbind, met die ruwe terrein van die groter lob wat 'n agtergrond vorm. Philae is om 08:35 Burgerlike Tyd vanaf 'n hoogte van 22,5 km bo die komeetmiddelpunt neergelaat, en 28 minute later is seine op die aarde ontvang wat die ontplooiing bevestig het. Dit het Philae egter sowat 7 uur geneem om na die oppervlakte neer te daal, en 'n verdere sein sou 'n suksesvolle landing bevestig.
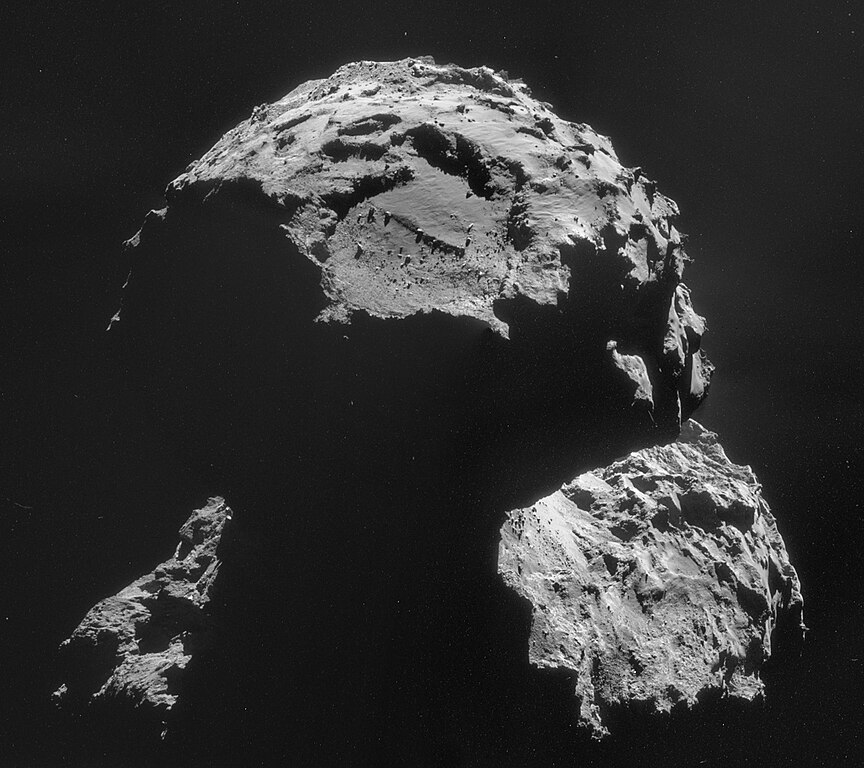
English: The Agilkia landing site is seen on this image of comet 67P/Churyumov–Gerasimenko, taken with Rosetta’s navigation camera on 6 November, just days before its lander Philae makes its historic descent to the surface.
The image presented here is a mosaic of four individual NavCam frames, captured from a distance of 30.5 km from the comet centre on 6 November 2014 while Rosetta was en route to the separation trajectory from which it will deploy Philae on 12 November 2014. At this distance, the image scale is 2.6 m/pixel, and the mosaic measures 3.7 x 3.3 km. The landing site, covering about one square kilometre, is located close to the top of this image, above the easily recognisable, boulder-filled depression that characterises the smaller of the comet’s two lobes. Although it may not seem like it from this image, Agilkia – previously known as Site J – presented the least hazardous terrain of all the landing sites considered during the selection process. Much of the surface of the comet is covered in boulders – some larger than houses – as well as steep slopes, deep pits and towering cliffs. In the lower part of this image, the narrowness of the neck region connecting the two lobes is emphasised, with the rugged terrain of the larger lobe in the background. On 12 November 2014, Rosetta will release Philae from an altitude of 22.5 km from the comet centre at 08:35 GMT/09:35 CET, with signals confirming deployment arriving at Earth 28 minutes later. Philae will take about seven hours to descend to the surface, with the signal confirming a successful touchdown expected to arrive on Earth in a one-hour window centred on 16:02 GMT/17:02 CET. Follow the landing events live via esa.int/rosetta. The four individual images making up this mosaic are available via the blog. |
| Date | |
| Source |
http://www.esa.int/spaceinimages/Images/2014/11/Agilkia_landing_site_6_November_2014 http://blogs.esa.int/rosetta/2014/11/10/cometwatch-6-november-target-locked/ |
| Author | ESA/Rosetta/NAVCAM, CC BY-SA IGO 3.0 |
| Other versions |
This file was derived from: |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Licensing
This photography is a Rosetta NAVCAM image created by the European Space Agency (ESA).
Their website states : "All Rosetta NAVCAM images are released under the Creative Commons Attribution-ShareAlike 3.0 IGO License. The user is allowed to reproduce, distribute, adapt, translate and publicly perform this publication, without explicit permission, provided that the content is accompanied by an acknowledgement that the source is credited as "ESA/Rosetta/NAVCAM, CC BY-SA IGO 3.0" as the source. A direct link to the license text is provided and that it is clearly indicated if changes were made to the original content. If any changes are made to the images, remix, translate or adaptation must be published under the same license terms (CC BY-SA 3.0 IGO) or a compatible license. You must also not give any suggestion that ESA necessarily endorses the modifications that you have made." To the uploader: You must provide a link (URL) to the original file and the authorship information if available. |
||
This file is licensed under the Creative Commons Attribution-ShareAlike 3.0 IGO license. Attribution: ESA/Rosetta/NAVCAM, CC BY-SA IGO 3.0
| ||
| Annotations | This image is annotated: View the annotations at Commons |
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 11:34, 10 November 2014 | | 1,424 × 1,266 (987 KB) | Vanished User cdJHGweI3s | User created page with UploadWizard |
File usage
The following 2 pages use this file:
Global file usage
The following other wikis use this file:
- Usage on af.wikipedia.org
- Usage on ar.wikipedia.org
- Usage on bn.wikipedia.org
- Usage on bs.wikipedia.org
- Usage on fr.wikipedia.org
- Usage on ja.wikipedia.org
- Usage on ru.wikipedia.org
- Usage on sh.wikipedia.org
- Usage on tr.wikipedia.org
- Usage on www.wikidata.org
- Usage on baike.710302.xyz
{kind=link}